一、引言:
场景的组织与管理是3d游戏开发中重要的一环,unity3d引擎中,只提供了最基本的场景组织,当我们加载场景时,会将场景中的物件及其依赖的资源全部加载出来,这对于较为庞大的场景显然是不合理的。可以考虑在进入场景时预先将可见范围内的物体加载,之后的其它物件也全部在当进入可见区域时加载,但如何才能快速索引到进入某区域的物体?因此,我们需要考虑一种层次化的场景管理机制,可以快速的索引出指定空间区域内的物体,以实现这种效果。
二、几何剖分技术:
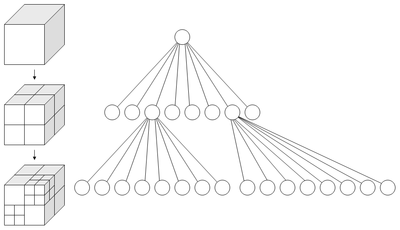
几何剖分技术是一种能将场景中的几何物体通过层次性机制组织,使用时可以快速剔除层次树的整个分支,从而加快索引几何体的过程。四叉树(quad tree)和八叉树(octree)是一种常用的空间剖分方法,它将已知的空间分成四/八个子空间作为节点,每个节点又划分成四/八个子空间,依此递归,直到达到指定深度。
四叉树:
八叉树:
三、原理:
四叉树/八叉树的数据结构不算复杂,其节点主要包含如下成员:数据成员Data,节点的包围盒信息Bounds,用于确定节点的空间信息(对于2D情况的四叉树,也可以是Rect),子节点引用。其中树的根节点拥有最大的Bounds,其子节点的Bounds将其分割成四/八个子Bounds。这样每次我们需要查找某点附近的数据时,可以根据节点的Bounds快速的剔除掉大量不需要查找的物体。
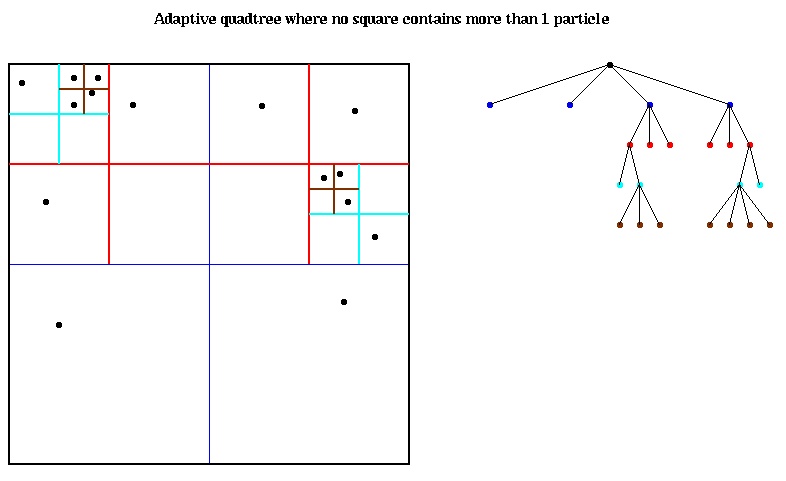
注意,由于插入的数据成员本身也包含空间位置和大小信息,可能出现数据刚好处于节点的边界上,如下:

如图中右上角的星星图案,其刚好位于两个节点的边界上,此时的处理方法有:
1.两个节点同时包含该数据
2.由父节点包含该数据(这样意味着不仅仅只有叶子节点可以存储数据)
第一种方式尽管相对精确,但如果存在特别大的物体可能覆盖多个节点,那就需要同时被这些节点引用,不容易管理。
本文的实现采用了第二种方式,一些很小的物体也可能出现没有插入到叶子节点而导致范围过大,特别的,如果该物体恰巧位于四叉树区域的正中心,则其只能被四叉树的根节点所包含。
另外还可以通过实现松散四叉树的方式,不在本文讨论范围内,可以查阅相关的文档或博客。
四、实现:
1.检索进入指定区域的物体
抽象出了一个检测器接口:
对于场景树中存储的节点和节点下的物体数据,其全部包含了一个Bounds数据,用于确定该节点或该场景物体的包围盒区域,这样每次进行检索时,实际上就是调用具体Detector的IsDetected接口,并传入Bounds,以判断该节点或该场景物体是否可以被检索。
我目前实现了两种形式的Detector,一种通过简单的设置Detector周围指定范围的六面体区域作为可见区域,另一种则是基于相机视锥体的判断,两种效果如下:
基于简单的六面体区域:

基于相机视锥体:

2.删除区域外的物体
对于场景物体,为每个物体初始化一个权重数据,每次物体被检索,权重进行累加,超出区域的物体则被推入一个优先级队列,该优先级队列根据权重排序,权重越大,表示在场景中滞留的时间越久,说明该物体出现的几率比较频繁,则删除的时机越靠后。一旦物体销毁,权重归零。


未完善的地方
由于待加载的物体是预先计算其包围盒并插入四叉树/八叉树中,如果涉及到物体的变换,考虑到需要更新物体的包围盒,这将影响原始物体在树中的信息,例如更新后的包围盒超出了物体所在节点的包围盒,导致不得不重新计算物体在树中的位置,因此该demo中暂时不涉及被加载物体会动态变换的情况,即目前仅适用于静态物体的加载。(当然如果物体的变换不会导致包围盒更新,例如播放一些原地不动的动画,则是可以支持的)
Demo下载地址请浏览我的博客原文:点击打开链接